ACTUALITES PLONGEE
Désormais, les robots océaniques volent en solo

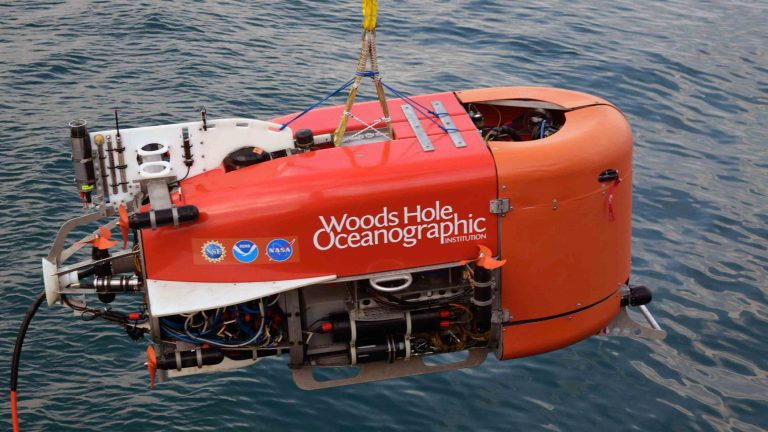
Photo : Evan Lubofsky, Institution océanographique de Woods Hole.
Le premier exemple connu d'un robot sous-marin prélevant un échantillon sédimentaire de manière autonome s'est produit sur Kolumbo, un volcan actif situé à 500 mètres de profondeur au large de l'île grecque de Santorin, dans la mer Égée.
Le bras robotique qui a prélevé l'échantillon pour une équipe internationale de chercheurs a été monté sur un véhicule hybride télécommandé appelé Nereid Under Ice (NUI), développé par la Woods Hole Oceanographic Institution (WHOI) du Massachusetts.
"Pour qu'un véhicule prélève un échantillon sans pilote au volant, c'était un énorme pas en avant", a déclaré Rich Camilli, scientifique de l'OMSI. "L'un de nos objectifs était de jeter le joystick, et c'est exactement ce que nous avons réussi à faire."
Les chercheurs étudiaient l’environnement « dur et chargé de produits chimiques » de Kolumbo et ses formes de vie microbiennes, tout en explorant dans quelle mesure les robots océaniques pourraient explorer sans intervention humaine.
Le NUI, de la taille d'une voiture intelligente, utilise un logiciel de planification automatisé basé sur l'intelligence artificielle, notamment un planificateur nommé Spock.
Cela lui a permis de décider quels sites volcaniques visiter et de prélever des échantillons de manière autonome, en les aspirant via un « tuyau d'échantillonnage ».
According to University of Michigan scientist Gideon Billings, whose code was used to collect the first sample, such automation will enable NASA to explore ocean worlds beyond our solar system.
"Si nous avons cette grande vision d'envoyer des robots dans des endroits comme Europe et Encelade [les lunes de Jupiter et Saturne, respectivement], ils devront finalement travailler de manière indépendante de cette manière et sans l'assistance d'un pilote", a-t-il déclaré.
11 Janvier 2020
Future research, also involving the Australian Centre for Field Robotics, Massachusetts Institute of Technology and the Toyota Technological Institute in Chicago, will include Formation ocean robots to see like ROV pilots, using “gaze tracking” technology, and building a human-language interface to allow scientists to address robots directly, rather than through a pilot.
"Nous pouvons éventuellement envisager un réseau de robots océaniques cognitifs où l'intelligence est partagée sur toute une flotte, chaque véhicule travaillant en coopération comme des abeilles dans une ruche", a déclaré Camilli. "Cela ira bien au-delà de la perte du joystick."
Le projet a été financé par la NASA et la National Robotics Initiative de la National Science Foundation.

